CCP集成和基于CANoe的简易标定实现
CCP简介
CCP就是基于CAN总线的标定协议,在没有这个协议之前,每个供应商有自己的标定工具和协议,五花八门,很难协调,终于有一天有个哥们跳出来制定了一个规范,说大家伙都按这个方法来搞标定测试吧,这个哥们就是ASAP,CCP协议属于其中的一部分。
标定说白了就是利用标定工具修改软件中的某些变量,以期达到系统最好的表现。具体是如何标定的呢,既然要修改一个变量的值,那就需要直到这个变量的地址和大小,通过上位机或者说标定工具给ECU这个地址和大小,并说,我要把这个值改成多大,ECU在收到指令信息之后,执行了修改的操作,标定工程师通过观察系统表现或者全局变量信息,再决定继续标定还是结束标定。
那这个指令如何发送呢,放在CAN通信的ECU上,那就是将这些指令装载在报文中与ECU进行交互。
CCP协议规定了28条命令,比如01 connect, 03 download 等等,这些指令作为报文的一部分,具体的报文格式可以查看协议。比较常用的就是设置MTA,download,upload。既然是通过CAN报文来交互,所以CCP协议有两个区别于APP报文,诊断报文,网络管理报文的两个ID,除此之外还需要规定唯一的CCP_STATION_ADDR和CCP_STATION_ID。以上信息都可以在协议中查到。
CCP的代码集成
CCP协议的驱动是依赖于CAN驱动的,因为归根结底就是报文的收发,所以首先需要实现CAN的驱动。其次,ccp驱动的主要功能其实就是对28条指令的解析和响应,也就是ccpCommand函数实现的功能
Vector公司官网有提供CCP的代码,所以集成的第一步就是移步官网下载驱动,然后再进行集成工作。下载文件如下:
这里可以看到CCP.C,CCP.H和CCPPAR.H三个文件,首先看CCPPAR.H如下:

这里的四个宏定义如上所属,需要修改为和项目定义一致。

这里ccp option可以按照需要来取消注释对应的宏定义,以开启对应功能。
最后一部分/* Special values for the CCPsim WIN32 Application */可以删掉不用。
CCP.C中主要实现了CCP报文的解析和响应,CCP.H中是宏定义及一些函数声明:

其中ccpSendCallBack必须要在DTO发送成功之后调用,其他函数都是CCP.C中实现的
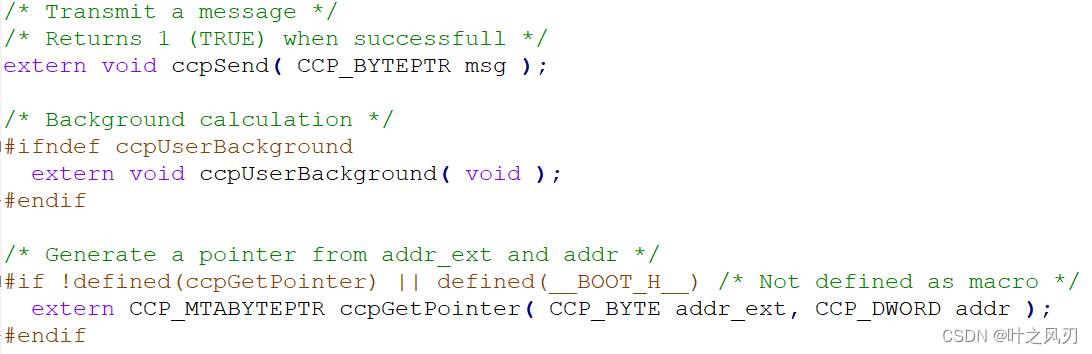
上述三个函数需要用户自己实现,其中第一个其实就是CAN驱动中的发送报文函数,ccpGetPointer是将第一数值转为指针类型
除此之外还需要实现ccpCheckWriteEEPROM函数,以实现对地址的访问,即修改改地址上的值。
CCP驱动和CAN驱动的联系点在于,在CAN接收中断中判断是否接收到CCP报文,并将字节信息存储在RAM中,并调用解析ccpCommand解析。接收函数需要周期型的判断,推荐1ms task执行。
另外,对于不同芯片,需要修改对应的中断使能和禁止函数。
基于CANoe的简易标定实现
CANAPE是强大的标定工具,通过导入A2L和MAP文件,可以实现与ECU的通信,并可以同时读取多个变量观测,实现标定。
首先思考CANAPE是如何做到的,A2L文件中只有标定变量的数据类型,但并不知道这个数据的flash地址在哪里,所以这个时候又加载了map或者ELF文件,这里面有着变量的ROM或RAM地址,CANAPE其中一个功能会不会就是解析A2L和MAP文件得出变量名,地址,大小等信息,最后通过可视化配置建立CCP通信并可以观测和修改数值。
那么如何用CANoe实现呢?
1.解析MAP文件,获取全局变量的标识符,地址及大小。
2.解析MAP文件,获取标定变量的标识符,地址及大小。
3.通过CAPL写CCP报文驱动
4.建立环境变量以显示或者选择需要读取的变量
5.建立显示面板panel,并将控件与环境变量绑定
主要难点在于MAP文件的解析,ccp报文收发比较容易如下:
void CcpDisConnect()
{ResponseFlag_CcpDisConnect = 0;CRO.byte(0) = 0x07;//DISCONNECTCRO.byte(1) = CTR;CRO.byte(2) = 0x01;//STOPCRO.byte(3) = fillbyte;CRO.byte(4) = 0x00;CRO.byte(5) = 0x39;CRO.byte(6) = fillbyte;CRO.byte(7) = fillbyte;output(CRO);SendFlag_CcpDisConnect = 1;
}void CcpSetMTA(dword addr)
{ResponseFlag_CcpSetMTA = 0;CRO.byte(0) = 0x02;//CcpSetMTACRO.byte(1) = CTR;CRO.byte(2) = fillbyte;CRO.byte(3) = fillbyte;CRO.byte(4) = (byte)addr;CRO.byte(5) = (byte)(addr >> 8);CRO.byte(6) = (byte)(addr >> 16);CRO.byte(7) = (byte)(addr >> 24);output(CRO);SendFlag_CcpSetMTA = 1;
}void upload(byte size)//read
{ResponseFlag_upload = 0;CRO.byte(0) = 0x04;//uploadCRO.byte(1) = CTR;CRO.byte(2) = size;CRO.byte(3) = fillbyte;CRO.byte(4) = fillbyte;CRO.byte(5) = fillbyte;CRO.byte(6) = fillbyte;CRO.byte(7) = fillbyte;output(CRO);SendFlag_upload = 1;
}
MAP文件的解析我是使用python实现的,如下:

最终实现效果为,在CANoe中可以实时观测全局变量,也可实现标定数据的修改,不失为一个轻量化debug的手段。