dToF直方图之美_2
你大都数看到的直方图可能是这样的,信噪比好,容易寻峰,即使存在多峰情况下,也是非常漂亮的直方图,可能你要针对于哪一个峰才是真正照到对应的Object,如果在不能调节deadtime以及SPAD参数的情况下,就很考验你算法的能力了

或者你看到的直方图是这个视频里的,永远只有单峰并且信噪比贼好,只要做好寻峰就好,也不需要对直方图做基本的矫正
,时长00:23
但是你可能会遇到这种,强光下的直方图,像海水一波波涛汹涌跳动,连个凸出的峰都没有,这就尴尬了。而且这种情况下能否准确寻峰,关系到你远距离和抗阳光的性能。而在成像里的表征就是到处是噪点好飞点,不知道对应那个object,整幅ToF图BiuBiuBiu。。。
,时长00:12
pixe直方图对应成像
大家可以重温这直方图,这是小面阵40X30里面对应的边沿和中心的9个pixel,当然每个pixel都能拉出直方图,但是为了说明我们选择最具代表性的9个pixel


大家可以看到第一个pixel对应的直方图,ToF值可以从图像的colorbar里看到大概数字
pixel0寻到的峰应该是在20~30的区间里


pixel(15, 39)峰值在10附近
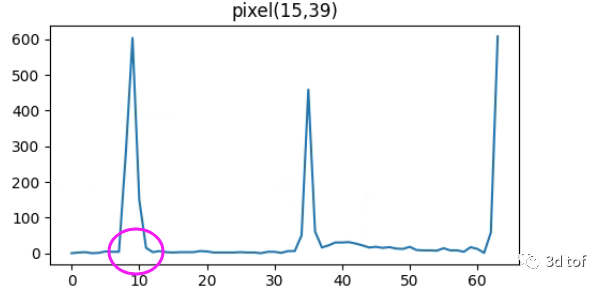

对于直方图映射到图像里的这个过程是不是很巧妙,很多算法工程师都是在后期图像里去操作,显然这已经是远离真相,并且抛开了dToF系统去追查根源,图像质量的好坏,以及精度的评测最直观的始终在直方图领域。
优秀的dToF Sensor原厂未必能够把直方图处理得优秀,苹果那颗lidar,索尼也只是提供了直方图,并没有提供直方图客户端的处理算法,真正牛逼的还是苹果公司的算法。但是对于是否能够处理好算法,就是客户对于dToF的研究透彻程度。对于玩dToF的人也不必拘泥于是不是能够处理好算法。
直方图里的每个峰值都应该引起足够的重视,正如你在看示波器里的波形,可能出现畸形的波形,拖尾的波形,毛刺的波形,以及水纹的波形,这些都是能够真正反馈dToF里电路的形态表征,外界对于Sensor的影响,有可能是阳光,温度,或者同类频率的激光串扰等等。